在嫦娥四号工程任务中���,尊龙凯时 - 人生就是搏!科学国家重点尊龙凯时 - 人生就是搏!行星尊龙凯时 - 人生就是搏!团队(www.pmrslab.cn)研发了月球车导航定位与月面环境感知技术与软件���,在北京航天飞行控制中心业务化应用于遥操作任务���,在着陆点定位���、月面三维地形重建���、障碍识别���、月球车视觉导航定位等方面做出了重要贡献。
在参加工程任务的同时���,行星尊龙凯时 - 人生就是搏!团队利用嫦娥四号获取的影像和光谱等数据���,与相关科研团队和载荷研制团队合作���,开展了着陆区形貌制图与演化分析���、表面矿物反演等科学研究���,取得了系列成果。
利用玉兔二号月球车全景立体影像制作的5cm分辨率DEM及已有中低分辨率DEM���,识别和量测了着陆区的线性溅射物地形特征���,并结合附近撞击坑形成过程的数值模拟���,指出着陆区表层是厚度约70米的溅射物���,这些溅射物是玉兔二号探测器所直接观测的物质���,其中最上层的东北-西南向线性溅射物来自芬森坑���,叠加在东南-西北向的艾德勒坑的溅射物上。量测和数值模拟表明玉兔二号所探测的月球物质来自于南极艾肯盆地底部���,而不是着陆区下部的玄武岩。相关成果2019年发表于GRL。
利用玉兔二号就位测量的光谱数据分析嫦娥四号着陆区矿物成分���,指出着陆区的矿物成分以橄榄石和辉石为主;并且由于南极艾肯盆地形成时已将月壳减薄甚至完全剥离���,撞击产生的熔融物甚至会发生分异���,所以着陆区的月壤可能主要来自月幔或者撞击熔融分异物。相关成果2019年发表于EPSL。
利用玉兔二号就位测量的光谱进一步分析嫦娥四号着陆区矿物成分���,光谱拟合结果表明着陆区月壤含有富镁橄榄石和富镁斜方辉石矿物���,二者相对含量基本相等。根据镁铁质矿物成分和芬森撞击坑空间位置���,进一步分析认为着陆区月壤可能源自南极艾肯盆地撞击事件形成的撞击熔融分异物或一套富镁岩石。相关成果2020年发表于Icarus。
利用玉兔二号就位测量的光谱数据分析嫦娥四号着陆区太空风化效应���,分析结果表明主要源于芬森撞击坑溅射物的月壤已发育成熟。与嫦娥三号着陆区未成熟月壤相比���,嫦娥四号着陆区月壤中亚微观金属铁含量随月球车与着陆器距离远近并未产生明显变化���,说明嫦娥四号着陆区月壤的快速形成过程充分混合了最表层已高度成熟的月壤。相关成果2020年发表于EPSL。
利用国内外轨道器影像���、嫦娥四号着陆器降落相机影像���、玉兔二号月球车导航相机及全景相机影像等多源数据���,基于摄影测量地形制图和视觉定位方法技术���,制作了米级至厘米级分辨率的数字高程模型和数字正射影像图等产品���,直接应用于嫦娥四号工程任务���,并支持了着陆区形貌与地质构造分析等科学研究。相关成果2020年发表于Science China Information Sciences和Remote Sensing。
上述研究得到了中国科学院先导科技专项���、国家自然科学基金���、国家重点研发计划的资助。

图1 嫦娥四号着陆区
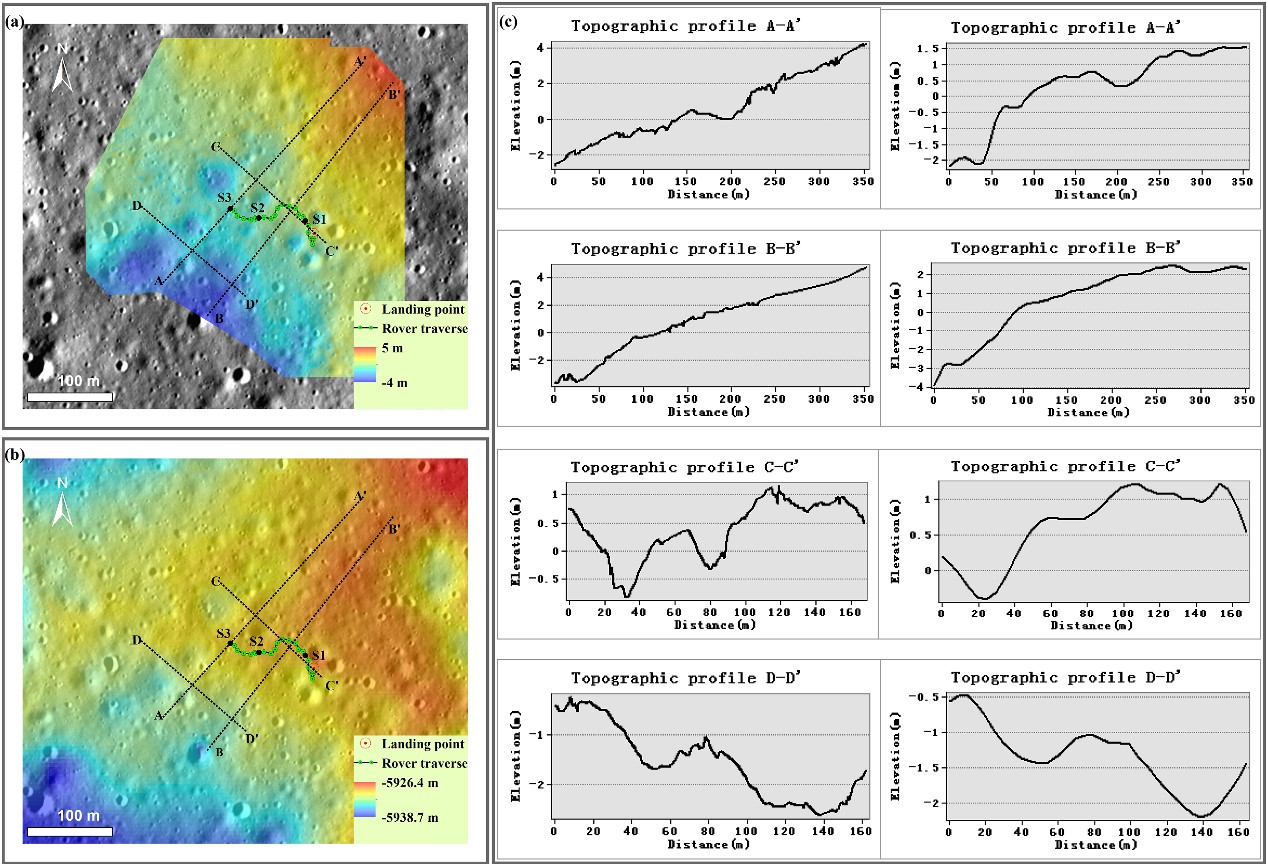
图2 嫦娥四号着陆区地形剖面图 (Di et al., 2019)
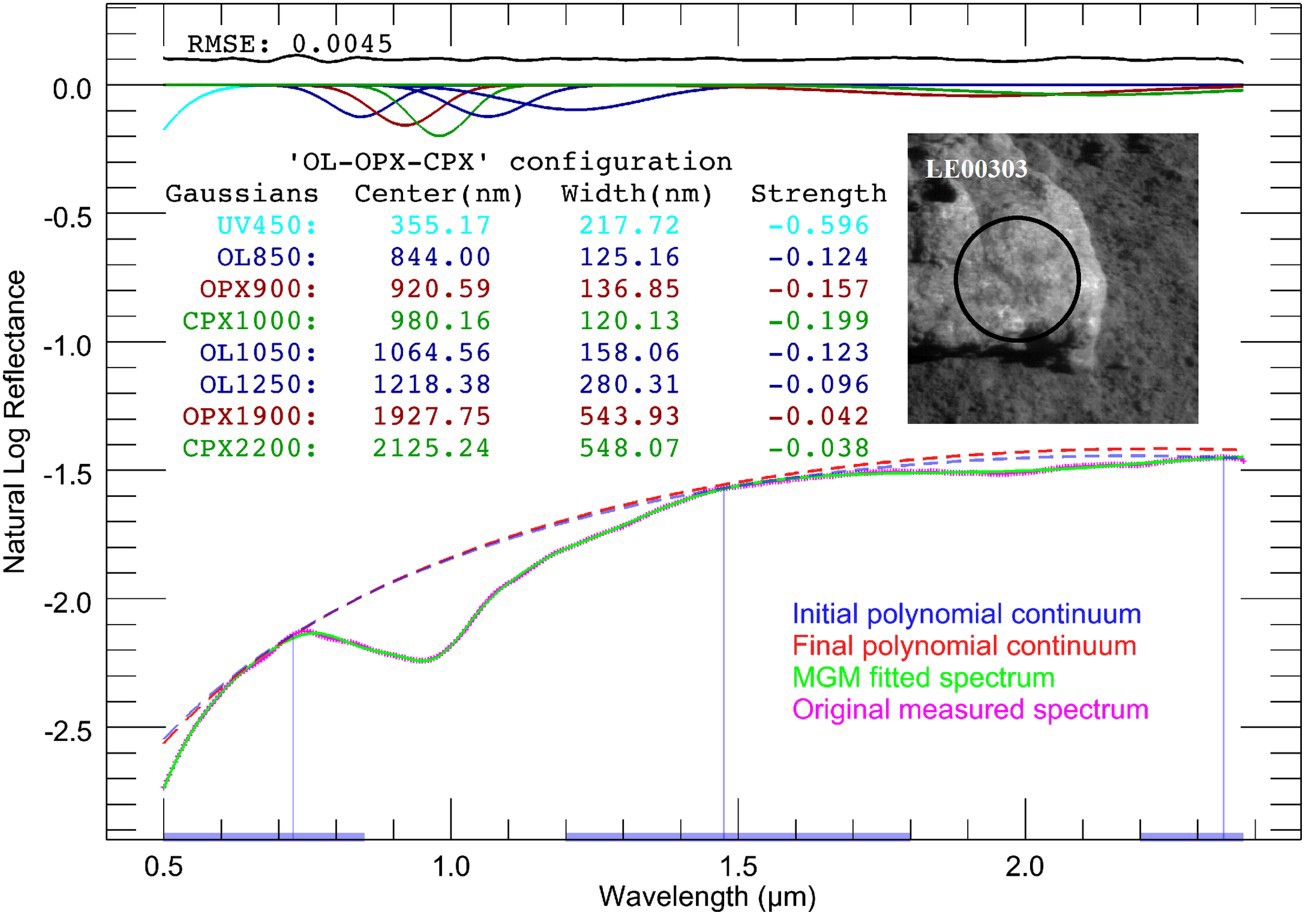
图3 玉兔二号就位测量光谱分析结果(Gou et al., 2020)
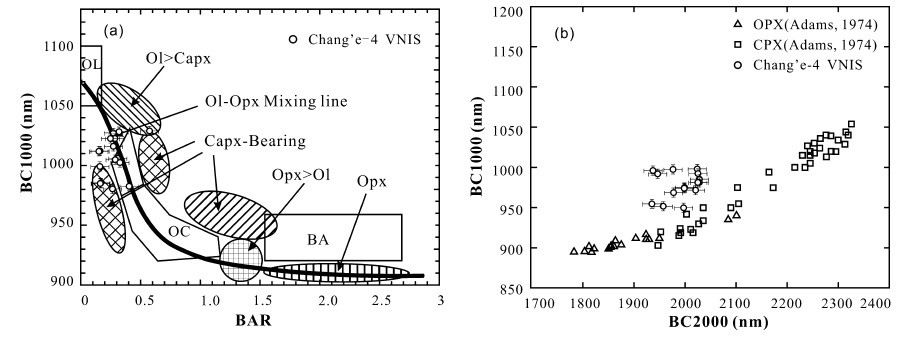
图4 玉兔就位测量光谱数据的光谱参数图(Gou et al., 2019)
发表的论文���:
[1] Di, K., Zhu, M., Yue, Z., Lin, Y., Wan, W., Liu, Z., Gou, S., Liu, B., Peng, M., Wang, Y., Niu, S., Zhang, J., Li, J., Xie, J., Xi, L., Yang, J., Xue, B., 2019. Topographic Evolution of Von Kármán Crater Revealed by the Lunar Rover Yutu-2. Geophysical Research Letters, 46, 12764-12770.
[2] Gou, S., Di, K., Yue, Z., Liu, Z., He, Z., Xu, R., Lin, H., Liu, B., Peng, M., Wan, W., Wang, Y., Liu, J., 2019. Lunar deep materials observed by Chang’e-4 rover. Earth and Planetary Science Letters, 528, 115829.
[3] Gou, S., Di, K., Yue, Z., Liu, Z., He, Z., Xu, R., Liu, B., Peng, M., Wan, W., Wang, Y., Liu, J., 2020. Forsteritic olivine and magnesium-rich orthopyroxene materials measured by Chang’e-4 rover. Icarus, 345, 113776.
[4] Gou, S., Yue, Z., Di, K., Wan, W., Liu, Z., Liu, B., Peng, M., Wang, Y., He, Z., Xu, R., 2020. In situ spectral measurements of space weathering by Chang’e-4 rover. Earth and Planetary Science Letters, 535, 116117.
[5] Liu, Z., Di, K., Li, J., Xie, J., Cui, X., Xi, L., Wan, W., Peng, M., Liu, B., Wang, Y., Gou, S., Yue, Z., Yu, T., Li, L., Wang, J., Liu, C., Xin, X., Jia, M., Bo, Z., Liu, J., Wang, R., Niu, S., Zhang, K., You, Y., Liu, B., Liu, J., 2020. Landing site topographic mapping and rover localization for Chang’e-4 mission. Science China Information Sciences, 63, 170-181.
[6] Wang, Y., Wan, W., Gou, S., Peng, M., Liu, Z., Di, K., Li, L., Yu, T., Wang, J., Cheng, X., 2020. Vision-Based Decision Support for Rover Path Planning in the Chang’e-4 Mission. Remote Sensing, 12, 624.

